World Soccer Strikers ‘91 is an arcade soccer game, with a high focus on local multiplayer gameplay. I started developing it in 2020, right after COVID-19 hit, and we all were forced to stay at home for a good bunch of weeks.
Some of the key elements of this game are its palpable arcade spirit, or the unique gameplay physics, where the ball is its own physical object, and bounces around totally decoupled from the bodies of the players on the field. However, from all the different design aspects of the game, one of the more complex, fun to develop, and crucial to hit, was the AI for the CPU-controlled players.
And I say complex without meaning it was technically challenging, or that the AI needed a specially intricate behaviour. Rather, AI for this game needed to be as stupid as possible, without reaching the point of being disruptive to the Player’s experience.
As a small note, the word player is used a lot in this article, to refer to the characters that appear in the game, running around and doing soccer stuff. To avoid confusion when mentioning the actual person who’s playing the game, we are going to refer to the latter as the Player, with a capital P.
World Soccer Strikers’ AI model
World Soccer Strikers ‘91 makes use of two different structures to model the behaviour of the AI-controlled players in the game. The first, a high-level State Machine; the second, a more specific set of Behaviour Trees for both goalkeepers and field players. Let’s take a deeper look.
general states
On a high-level, the AI that controls the players works with a state machine, tightly bound to the overall flow of a match in World Soccer Strikers. Said State Machine defines the following states:
-
In-Game. The players are actively participating in the match, and executing the corresponding AI logic, depending on whether they play in a goalkeeper or field position, and whether they are in the Player’s team or not.
-
Goal Scored. If their team scores, players will run around the pitch, celebrating. It’s a pretty silly state that picks random points that players can run towards, while a whole UI sequence plays in the foreground.
-
Goal Received. While players in the other team celebrate, players in the team that received the goal will stand still, playing an idle animation with a defeated look. This state also lasts for the duration of the “goal scored” UI sequence.
-
Match End. In a very similar fashion to the previous two states, as players will celebrate and run around if they’ve won the match. The only addition is that they will remain with a standard idle animation in case of a tied match.
-
Transition. This is a utility state, utilized to transition to another arbitrary state, only with an extra time delay. While said transition is running, the player will appear to be in a sort of an inactive state.
-
User Controlled. The final state we define is a sort of a fake state, where no AI code is execute. When a character is controlled by a Player, the received input is treated as AI actions that we then send for execution, in the same way as other AI states in this State Machine do.
 change of state after a goal - capture courtesy of DeVuego.
change of state after a goal - capture courtesy of DeVuego.
Something to mention regarding the high-level State Machine is that it does not include any sort of implementation for automatic transitions. Every jump to a different state is manually and explicitly triggered in different parts of the gameplay code.
Should the model were more complex than it actually ended up being, this decision might, indeed, not have been the wisest. However, this solution turned out to be a pretty good option, that just does the trick, and, due to the simplicity of the gameplay needs, most of the alternatives would have been a complete over-kill for readability and maintainability of the code.
behaviour trees
Behaviour Trees are a data structure that is composed of different kinds of nodes, connected in the shape of a tree, that will be evaluated in a depth-first manner.
Although many types of nodes can be used in a video game AI, World Soccer Strikers utilizes the three minimum ones that every Behaviour Tree needs to define, plus an extra utility node for convenience. They list as follow:
-
Action Node. Executes an action, which can take an arbitrary amount of time to complete. Every update tick, we execute the code in this action node and evaluate whether the current state is a
Success, this is, we completed the task without any inconvenience; whether we might still beRunningthe action; or if, alternatively, the execution was aFailure. -
Sequence Node. Stores a list of child nodes, and executes them. When the current active child executes successfully, it will start updating the next sibling. In case a failure state was returned, the execution would stop and run again, starting from the first child.
-
Selector Node. Works similarly to the Sequence Node, with the difference being that the Selector will try to update all its children, one after the other, until we find the first sibling that does not fail to execute.
-
Wait Node. This last one is an utility node, that will just wait for an arbitrary amount of seconds until it succeeds. It can come in handy when adding cool-downs between actions in Sequence Nodes.
To illustrate how this would work, here’s a small example of how a goalkeeper’s Behaviour Tree looks (omitting the logic inside the tree action nodes).
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
BehaviourTree BuildBT()
{
return new BehaviourTreeBuilder(_keeper)
.Sequence("behaviour")
.Selector("defence")
.Sequence("jump-sequence")
.Do("jump", t => BT_Jump())
.WaitSeconds("wait", _jumpTime)
.Do("stop", t =>
{
_mov = Vector2.zero;
return BehaviourTreeStatus.Success;
})
.End()
.Do("keep-in-bounds", t => BT_KeepPlayerInBounds())
.Do("follow-ball", t => BT_FollowBallMovement())
.End()
.WaitSeconds("wait", bt_updateTime)
.End()
.Build();
}
goalkeeper AI
As one might guess from the code above, goalkeepers have -by far- the simplest behaviour among AI-controlled players in the game.
Their activity is limited to moving around, in-bounds, trying to follow the ball and, if they reckon it’s a good chance to do so, jump and try to stop it.
It’s worth mentioning that their behaviour includes some tweaks to add some flavour to gameplay. For example, jump speed and cool-downs will change depending on match difficulty; and some constrains are applied to the jumping actions, preventing the goalkeeper to jump forward and invade the Player’s space.
field player AI
Now, if we talk about field players, World Soccer Strikers’ AI makes all of them take part in both offensive and defensive duties -except for some exceptions that we will mention later in this article.
While this behaviour is considerably more complex than a goalkeeper’s, we try to stick to the general simplicity of the gameplay, and have a very reduced set of key decision points for AI-controlled field players.
Some of the most important checks in the Behaviour Tree when the player is attacking are:
-
Does a teammate have the ball? If so, do not disturb them. Try to maintain position or getting open to receive a pass.
-
Is any rival next to me? If a player has control of the ball, the main question that will determine which actions to take is whether there’s any rival nearby. If the path is free, we will try to get the best look at the goal as possible, and shoot to score. However, in the case of being next to an opponent, the options will be reduced to attempting a dribbling move or passing the ball to an open teammate.
Meanwhile, on defense we can find a decision tree that kinda mirrors the one we just described:
-
Am I near the ball? Try to get between it and the goal. If possible, clear it in the opposite direction from the defending goal.
-
In my team, Am I the closest to the ball? Run towards it, with a strong preference of getting in front of it. If we evaluate we have a nice chance, tackle the opponent -as the move will get us closer to the ball too.
-
Is the goal unprotected? While the default instruction for defenders is to keep position if there’s a teammate trying to engage with the ball, all of them will run to cover the defending goal if the attacker has a clear line of sight. When the goal is protected by another teammate, the player will be able to go back to their original position.
As an extra consideration, there might be moments of the match in which two players are fighting for control of the ball, thus, possession is not totally in favour of either team. For this specific cases, players that are not engaging in that fight take a sort of minimalistic branch in their Behaviour Trees, that tries to ensure that: everyone maintains their position in the field, away from the ball, so that we are not adding fuel to the fire; and we try to make sure that there’s at least one player protecting the goal, in case the fight for possession ends in a random shot.
player senses
Now, all these decisions that the AI must make have to be bound to the actual state of the match -otherwise, anything of what we’ve mention would make much sense-. That’s why World Soccer Strikers’ players have an extra component to define their senses.
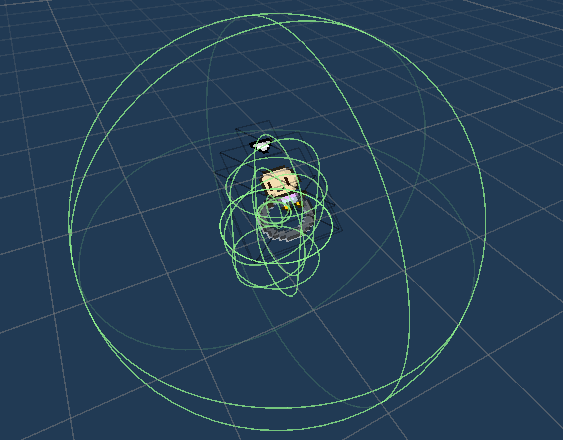 trigger areas for player senses.
trigger areas for player senses.
In this game, we call senses the set of inputs that the AI will receive to make the most adequate decision every frame. And, although the list is not too long, it does more than enough to give us the data that we need to evaluate the tactical situation of a player. They function in the following way:
-
Ball control area. Region where, should the ball be in this range, the player can interact with it. This is, shooting it, passing to a teammate, or attempting a dribble move. It applies regardless of whether the player is in the attacking or defending team.
-
Opponent influence area. This area is also used to check for close teammates. This way -taking back the example from the previous section-, we can avoid situations in which two players of the same team try to engage with the ball at the same time.
-
“Near ball” area. This last region defines whether a player is in range to be considered “next to the ball”. Apart from determining several decisions in the players’ Behaviour Trees, it’s also used to resolve which team has control of the ball.
-
Distance to goal. From the -very few, actually- field positioning metrics that players hold, the distance to the goal might be the most relevant. As we implemented a heavy bias to prevent players from kicking far goal attempts, this distance turns out to be the one of the main factors dealing with the behaviour of an attacker.
-
Line of sight. As opposed to the previous metric, this one is used for both offense and defense. In the case of an attacking player, they will check their own line of sight towards the goal with the objective of finding an open look to shoot the ball; when that player is defending, though, they will check the line of sight of their opponent, to know whether they should run to cover the defending goal.
team tactics
Another point of discussion is how these individual behaviours we’ve described work and organize together as a team. And actually… in the case of World Soccer Strikers, we don’t worry much about this topic.
As we dealing with a multiplayer-first, party game, we took the decision of reducing team tactics to their minimal expression: the team formation.
 initial kick-off of a match, where we can clearly see the two formations the teams are adopting.
initial kick-off of a match, where we can clearly see the two formations the teams are adopting.
With this approach, each team can have a go-to layout that defines the preferred position for each AI-controlled player. And, to spice things up a little bit, higher difficulty levels also define a special behaviour for players that end up in a winger or backer role -although this special case for AI only applies in Player vs CPU matches.
This turned out to be a pretty good call, as these formations give personality to each team in the game, and invite the Player to try different things with every new opponent.
swapping players
As a finishing note, a common question in cases like this is: what if the Player wants to swap characters and take control of an AI-controlled player?
Well, in World Soccer Strikers this was not really an issue, as the question was solved in a pretty natural, straight-forward way: as mentioned before in this article, we consider “controlled by Player” to be just another AI state. In the end, from the high-level view, that’s just a black box that, after an update tick, tells the player where to move and whether it should pass or shoot the ball.
This approach simplifies the whole swapping players feature, converting it in a mere change of state. When the Player swaps again and the AI re-takes control, the in-game state resets and starts executing again. Just as if we were coming from, for example, a “goal received” state.
